
Tokyo Olympics College Medal Count 🏅
Paid
Members
Public
College medal count for the 2020 2021 Tokyo Olympics. Olympic medals by college 2021.

How Antarctica became the best place to find meteorites
Paid
Members
Public
The Antarctic explosion that rocked the meteorite world
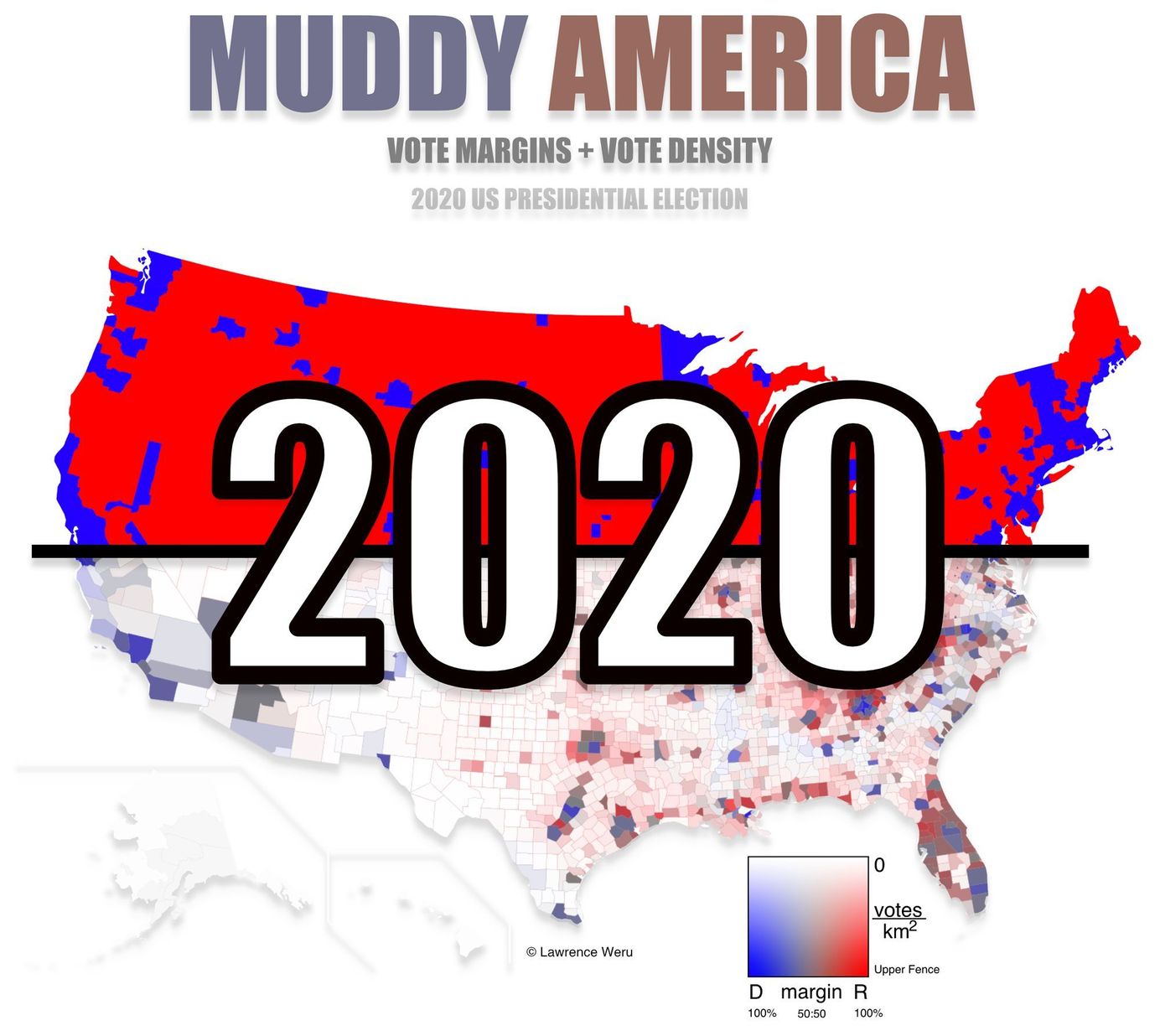
2020 Presidential Election County Level Muddy Map
Paid
Members
Public
2020 US Presidential Election Interactive County-Level Vote Map
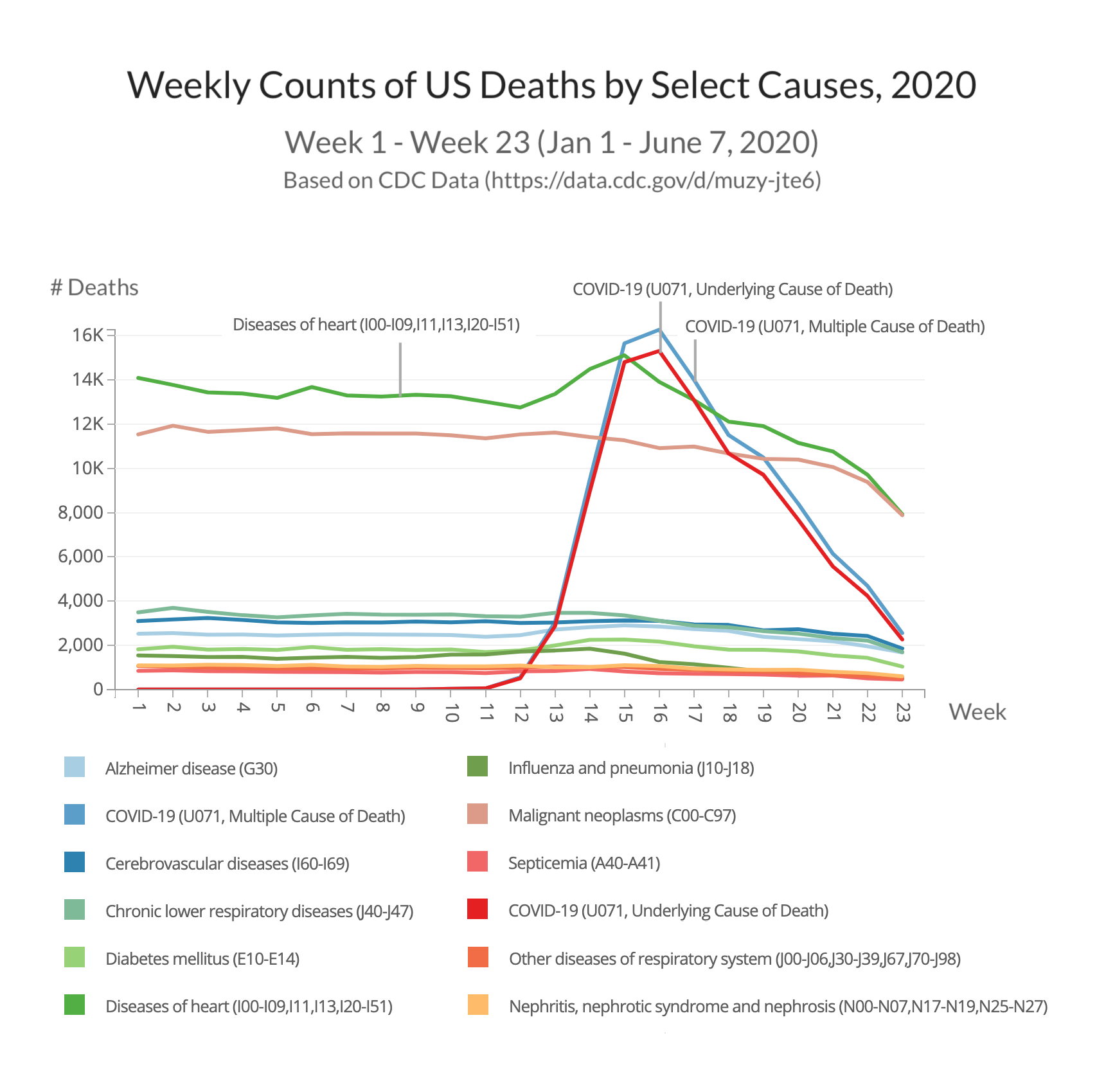
Weekly Counts of US Deaths by Select Causes through June 2020
Paid
Members
Public
This graph uses CDC data to compare COVID deaths with other causes of deaths.
11 Animated Algorithms for the Traveling Salesman Problem
Paid
Members
Public
For the visual learners, here’s an animated collection of some well-known heuristics and algorithms in action.

Muddy America : Color Balancing The US Election Map - Infographic
Paid
Members
Public
The Trouble with the County Winner Map, and why this Muddy Map is better for determining vote populations and vote margins in the US election. Infographic.

Why Objects have Colors - Illustration - Animation
Paid
Members
Public
Why do objects in nature have the colors that they do? Although sunlight appears white, it contains all the colors of the rainbow. Objects absorb some of those colors and reflect others into your eyes. Different objects reflect different colors. The colors that are reflected into your eyes are considered

The Water Cycle - Infographic - Animated GIF
Paid
Members
Public
EvaporationWith enough heat, water will evaporate, turning into water vapor, a gas. Water vapor rises and condenses as clouds. TranspirationAs water moves up plants, excess water reaches the plants' surface via transpiration. With enough heat, this water becomes water vapor. Water vapor rises and condenses as clouds. CondensationWater droplets in